
![[A-note] Bechkoff, TwinCAT CNC·서보드라이브 기술로 초소형 부품 정밀 대량생산 지원](/news/thumbnail/202404/53006_59234_950_v150.jpg)


프로토콜 간 번역기(Translator Between Protocols)
netTAP, 서로 다른 네트워크 프로토콜 간 자동 변환 가능
자동화 기술은 지속적인 기술개발이 특징이다. 이러한 다이내믹한 환경에서 개별 컴포넌트들이 갑자기 더 이상 연결이 되지 않는 경우만으로도 새로운 솔루션이 필요한 상황이 비일비재하게 발생하고 있다.
b+m surface systems는 부품 공급 업체가 현대화된 Real-Time-Ethernet 프로토콜에 대한 지원을 제공하지 못하고 있는 상황에 직면해 있었다. 그러나 프로토콜 컨버터 형태로 개발된 솔루션은 매우 효과적이었으며, 많은 추가 혜택들을 제공하게 됐다.
아민 퓨링거(Dipl.-Ing. Armin Puhringer)
Hilscher Gesellschaft fur Systemautomation mbH, 아시아퍼시픽 지역 세일즈 매니저
 b+m surface systems는 1992년에 설립됐으며, 얼마 지나지 않아 수성페인트용 애플리케이션 시스템 전문회사로 발돋움했다. 현재 이 회사는 평범한 페인팅 시스템에서부터 연관된 자동화 기술을 포함하는 완전 자동 페인트 애플리케이션 솔루션까지 완벽한 기술 스펙트럼을 제공하고 있으며, 독일 Eiters feld에 본사를 두고 폴란드와 러시아에 자회사를 운용하고 있다.
b+m surface systems는 1992년에 설립됐으며, 얼마 지나지 않아 수성페인트용 애플리케이션 시스템 전문회사로 발돋움했다. 현재 이 회사는 평범한 페인팅 시스템에서부터 연관된 자동화 기술을 포함하는 완전 자동 페인트 애플리케이션 솔루션까지 완벽한 기술 스펙트럼을 제공하고 있으며, 독일 Eiters feld에 본사를 두고 폴란드와 러시아에 자회사를 운용하고 있다.
b+s surface systems는 페인팅 로봇과 Atomizers 및 Paint Changing System을 포함한 모든 핵심 부품들을 자체 생산하고 있다. 프로세스 자동화용 하드웨어와 소프트웨어 부품들까지도 내부에서 개발하고 있으며, 자동차 페인트 숍의 특정 요청사항에 맞게 제작도 하고 있다.
로봇 간 상호작용(Robots in Interaction)
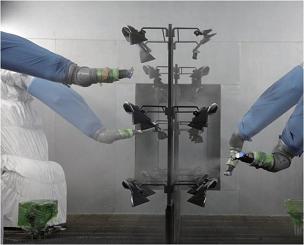
전형적인 페인팅 시스템은 순차적 운용을 위한 여러 개의 스테이션으로 이뤄져 있다. 프로세스는 소재의 Flaming으로 시작해 Primer, Base Coat, Clear Coat와 같은 여러 단계의 코팅 애플리케이션에 의해 진행된다. 코팅은 사람의 개입 없이 응용 로봇에 의해 자체적으로 이뤄진다. 이 로봇들은 일정 두께의 코팅을 확실히 보장하는 애플리케이션으로 프로그램돼 있다. 로봇의 페인트 공급은 필요한 코팅 재료뿐만 아니라 노즐을 세척하기 위한 수세식 물질까지 제공되는 중앙 페인트 준비 섹션에서 처리된다.
엔지니어링 스테이션 외에도, 여러 대의 산업용 PC들이 프로세스 기술과 재료 전송 기술을 모두 제어하기 위해 사용되고 있다. 이 PC들은 Flaming, Primer, Base Coat와 Clear Coat용의 각 애플리케이션 스테이션으로 할당돼 있다.
RH04.0 Bosch-Rexroth 로봇 컨트롤러가 필드 레벨에서 사용되는 반면, b+m surface systems는 프로세스 컨트롤 레벨에서 Beckhoff사의 IPCs를 사용하고 있다. 두 레벨 간 통신은 CAN 인터페이스를 통해 이뤄진다. 통합된 CAN/CAN 게이트웨이는 외부 CAN 버스를 개별 로봇 컨트롤러를 이용해 내부 CAN 버스의 IPCs로 연결한다.
사용 언어와 프로토콜(Languages and Protocols)
일반적으로 프로세스 제어 시스템은 매우 특별한 목적과 요구사항들을 기반으로 설계되고 있다. 이는 가장 적합한 네트워크 테크놀로지를 통해 서로 매칭하고 연결할 하드웨어 컴포넌트들의 선정을 포함한다. b+m surface systems의 자동 페인팅 애플리케이션 시스템으로 인해, 다른 기능들과 연관된 특정 요청사항들을 매칭하는 다중 프로토콜의 사용이 필요하게 됐다.
예를 들면, 페인트 준비 섹션 내 개별 필드 디바이스의 연결은 특정 I/O 인터페이스를 통해 이뤄지는 반면, 제어 센터에 있는 PC는 PROFI NET을 통해 페인트 준비 섹션에 연결되어 있는 것이다. 모든 컨트롤러들이 Ethernet과 TCP/IP를 통해 통신하는 데 반해, CANopen은 컨트롤룸 내 PC와 개별 애플리케이션 로봇들 간 실시간 통신용으로 사용됐다.
여러 프로토콜로 인한 단점 발생(When Protocols Represent a Disadvantage)
 기술개발은 지속되고 있다. 페인팅 솔루션은 많은 나라에서 사용되고 있으며, 업체들 또한 모든 종류의 최신 Ethernet 기반 통신 표준을 다루기를 원하고 있다. 이에 따라, b+m surface systems는 자체 로봇 컨트롤러로의 연결에 직면하게 됐다. 하지만, 보쉬렉스로스는 Ether CAT, PROFINET I/O 및 미국 시장에서의 주 표준인 EtherNet/IP와 같은 최신 Real-Time-Ethernet 프로토콜이 아닌 CANOpen만 제공하고 있었고, 이는 업체로 하여금 대체 솔루션을 찾도록 만들었다.
기술개발은 지속되고 있다. 페인팅 솔루션은 많은 나라에서 사용되고 있으며, 업체들 또한 모든 종류의 최신 Ethernet 기반 통신 표준을 다루기를 원하고 있다. 이에 따라, b+m surface systems는 자체 로봇 컨트롤러로의 연결에 직면하게 됐다. 하지만, 보쉬렉스로스는 Ether CAT, PROFINET I/O 및 미국 시장에서의 주 표준인 EtherNet/IP와 같은 최신 Real-Time-Ethernet 프로토콜이 아닌 CANOpen만 제공하고 있었고, 이는 업체로 하여금 대체 솔루션을 찾도록 만들었다.
이 경험은 현재 보유하고 있는 솔루션의 여러 가지 단점을 보여줬기 때문에 나중에는 오히려 기회로 작용했다. 예를 들어, CAN/CAN 게이트웨이는 스위칭 캐비닛 내에서 꽤 많은 공간을 요구할 뿐만 아니라, 게이트웨이를 동작시키려면 네트워크 Configuration에 대해 자세히 알고 있는 전문가가 필요하기 때문에 시스템을 시동하는데 다소 어려웠다.
Real-Time-Ethernet 프로토콜은 원래 필드버스 프로토콜 기반으로 개발된 것으로, 데이터 통신 기능을 제공할 뿐만 아니라, Slave 컴포넌트들의 논리적 구조를 반영하기 때문에 통신 표준에 따라 이는 상당히 복잡해질 수 있다. 그러나 실생활에서의 상황은 또 달랐다. 예를 들어, 페인팅 애플리케이션용 제어 시스템을 시동하는 동안에도 안정적인 페인팅 프로세스의 보장은 매우 중요하고, 이는 게이트웨이가 종합적인 Configuration 지식을 갖고 있어야 하는 현장 직원 없이 쉽고 신속한 시동이 필요함을 의미한다.
b+m surface systems는 많은 투자와 기존 시스템 구조의 광범위한 변경 없이 대체 솔루션을 찾기로 결정했고, 결국 독일의 Hattersheim에 있는 Hilscher와 협력하게 됐다. Hilscher는 자동화 시스템용 기반 컴포넌트에 특화돼 있으며, 다른 네트워크 통신 프로토콜에 대한 심층적인 지식을 보유하고 있었다. 결국, b+m surface systems는 Hilscher 본사 전문가들과 단시간 내에 통신 문제를 해결하기 위한 이상적인 솔루션을 찾을 수 있었다.
프로토콜 정글 속에서의 중재자(Mediator in the Jungle of Protocols)
이 솔루션은 netTAP이라고 불리는 매우 콤팩트한 컴포넌트다. 이전의 게이트웨이와는 달리 스위칭 캐비닛 내에 아주 작은 공간만 확보되면 된다. netTAP은 프로토콜 컨버터로 서로 전혀 다른 통신 네트워크를 연결하기 위해 제공된다. 데이터량과 전송 속도가 고려되는 한 각 레벨에는 특정 요청 사항들이 있기 때문에, 프로세스 제어를 통한 ERP부터 필드레벨까지 다양한 네트워크 프로토콜들이 사용되고 있다는 것을 확인한 후에 개발됐다.
netTAP은 두 네트워크 사이에서 게이트웨이로 동작한다. 디바이스는 두 개의 다른 네트워크 프로토콜들 사이에서의 변환을 자동 처리함으로써 정보의 원활하고 투명한 흐름을 가능케 한다. 현대 자동화 기술에서 netTAP은 기존 필드 디바이스들의 교체 없이 시스템 현대화를 위한 간단한 방법을 제공하고 있다. 이는 시스템 성능 개선과 함께, 자체 투자를 보호하고자 하는 업체에 있어서는 반가운 소식이었다.
컨버터의 구현은 매우 간단했다. 각 프로토콜을 선택하고 Configuration 인터페이스를 통해 네트워크 파라미터의 설정과 각 프로토콜에 대한 데이터 할당만 해주면 된다. 이를 위해, 컨버터에는 노트북으로의 간단한 연결을 통해 쉽게 Configuration할 수 있도록 해주는 USB 인터페이스가 장착돼 있다.
Hilscher는 b+m surface systems의 페인트 응용 프로그램 시스템을 위해 EtherCAT에서 CANopen으로 링크가 가능함으로써 양쪽 프로토콜 간 무제한 Real-Time 통신이 가능한 Hilscher의 netTAP100 RE-CO 모델을 제안했다. 이 모델은 두 개의 터미널이 장착된 프로토콜 컨버터로, Firmware와 Configura tion Data의 간단한 로딩으로 Configura tion이 가능하다. X2 터미널은 Ethernet 및 필드버스 인터페이스로, X3 터미널은 필드버스, Ethernet 및 시리얼 인터페이스로 사용 가능하다. 두 터미널 모두 제품의 전면에 위치해 있다.
추가적으로, 이 제품은 USB 인터페이스도 제공하고 있다. USB 인터페이스는 디바이스의 Configuration과 진단을 위해 노트북과 연결하는 데 사용된다. 이를 위해 Hilscher에서는 Configuration과 진단용 소프트웨어인 SYCON.net을 제공하고 있다.
추가적인 가치를 지닌 간편한 솔루션(Simple Solution with Added Value)
CANopen 표준이 보유하고 있는 고수준의 적합성으로 인해 제품 인증 동안에 발생한 첫 번째 난관은 신속하게 극복할 수 있었다. b+m surface systems는 과거 Bosch RH04.0 컨트롤러로 작업을 한 적이 있기 때문에, 원래 기능 중 일부는 여전히 사용되고 있었다. 이러한 측면에서 netTAP 100-RE-CO로의 CANopen 표준을 완벽히 구현하는 데 큰 도움이 됐다. 또한, Hilscher 기술지원팀은 새로운 솔루션으로의 변화를 촉진하기 위해 필요한 지속적인 지원을 약속했다.
결국, b+m surface systems는 새롭게 구현된 솔루션에 매우 만족하게 됐고, netTAP 덕분에 완전히 새로운 솔루션을 개발할 필요도 없었을 뿐만 아니라, 기존의 H/W와 S/W 기반을 지속적으로 사용할 수 있었다. netTAP의 또 다른 이점은 Hilscher 프로토콜 컨버터가 기존 CAN/CAN 게이트웨이와 비교했을 때 캐비닛 공간의 일부분만 필요로 한다는 것이다.
더욱이 시동 작업의 단순화로 인해 로봇 프로그래머들을 위한 유료 교육과정이 불필요하게 됐으며, 현장 직원들은 애플리케이션 자체뿐 아니라 시스템의 전반적인 기능에 집중할 수 있게 됐다. 제어 가능한 수많은 프로토콜들이 미래에 적합한 솔루션을 만들어 가고 있다. Hilscher 프로토콜 컨버터 netTAP은 유럽 외 많은 나라들이 선호하고 있는 표준을 포함하고 있기 때문에 초기 문제를 해결하기 위한 명쾌한 솔루션이 될 뿐만 아니라, 미래를 위한 준비가 될 수 있다.
실제로 응용프로그램을 하는 동안 매우 짧은 대기 시간이라는 netTAP의 또 하나의 장점을 확인할 수 있었다. 이로 인해 로봇 스위칭 캐비닛과 컨트롤 캐비닛 간 통신 속도를 높이는 것이 가능해졌으며, 이는 페인팅 프로세스의 제어를 향상시키는 또 다른 측면이 됐다.
이러한 사례가 보여주는 바와 같이, 정기적인 기술개발이 항상 전혀 새로운 솔루션을 필요로 하는 것은 아니다. 때로는 서로 다른 프로토콜 연결을 위한 매우 작은 컴포넌트 하나가 프로세스 제어 단순화와 비용 절감에 필요한 전부가 되기도 한다.







