


![[A-note] Bechkoff, TwinCAT CNC·서보드라이브 기술로 초소형 부품 정밀 대량생산 지원](/news/thumbnail/202404/53006_59234_950_v150.jpg)
 ‘한국 제조업의 위기’가 근년에는 수치 지표로 구체화되고 있다. 필자는 여전히 자동화와 로봇화가 부족한 산업계가 이전과 다른 자세로 로봇을 도입하고 보급해 생산성의 혁신을 이뤄야 한다고 본다.
‘한국 제조업의 위기’가 근년에는 수치 지표로 구체화되고 있다. 필자는 여전히 자동화와 로봇화가 부족한 산업계가 이전과 다른 자세로 로봇을 도입하고 보급해 생산성의 혁신을 이뤄야 한다고 본다.
FA 비전은 자동화 분야에서 날로 비중이 커지고 있다. 이번에 소개하는 로봇 비전은 종래의 FA 비전을 로봇과 결합한 것으로 고정된 카메라로 제품을 검사하는 대신에 로봇 끝에 카메라를 부착해 로봇의 이동 궤적에 따라 카메라를 능동적으로 움직여서 검사점을 수시로 변경한다거나 검사 부위를 훨씬 상세히 볼 수 있도록 한다.
NTVision은 NT리서치의 로봇 비전 제품 시리즈로 대상물의 조립 상태나 표면의 결함을 검사하는데 주로 사용된다. 6축 로봇 팔 끝에 고성능 카메라와 조명으로 구성된 로봇 비전 모듈을 장착해 대상물의 검사 부위를 순차로 통과하면서 비전 검사를 하는 액티브 방식 제품이다. 조립 상태 검사 제품인 NTVision-NS의 경우, 부품의 유무, 비슷한 부품들의 조립 오류, 케이블의 배선 상태를 로봇이 무정지 상태에서 고속으로 검사할 수 있다. 표면 결함 검사 제품인 NTVision-SD는 스크래치, 크랙, 이물질 등 대상물의 세밀한 표면 상태를 높은 해상도의 카메라와 넓은 시야각을 가진 고성능 렌즈로 검사할 수 있다.
 이번에 출시된 NTVision-3D는 대상물의 위치와 자세를 측정할 수 있어 로봇이 그리퍼로 대상물을 안정적으로 잡을 수 있다. 산업 현장에서 다수의 대상물이 한데 섞여 하나씩 분리해 정렬해야하는 공정이 많은데, NTViision-3D를 이용하면 정렬 공정을 로봇화해 인력을 대체할 수 있다.
이번에 출시된 NTVision-3D는 대상물의 위치와 자세를 측정할 수 있어 로봇이 그리퍼로 대상물을 안정적으로 잡을 수 있다. 산업 현장에서 다수의 대상물이 한데 섞여 하나씩 분리해 정렬해야하는 공정이 많은데, NTViision-3D를 이용하면 정렬 공정을 로봇화해 인력을 대체할 수 있다.
NTVision-3D는 대상물의 CAD 정보를 이용해 3차원 비전을 구현한다. NTVision-3D는 대상물의 CAD 정보와 3차원 계측 결과를 절묘하게 결합해 계측 시간을 단축하고 인식률을 크게 개선했다. NTVision-3D는 그림 2와 같이 2대의 카메라로 구성된 스테레오 방식으로 대상물을 3차원 계측한다. 2대의 스테레오 카메라는 로봇 끝에 부착하거나 천정에 설치한다. 로봇 끝에 부착하면 대상물을 다양한 각도로 촬영할 수 있다는 장점이 있는 반면, 천정에 설치하면 대상물을 넓은 시야로 촬영할 수 있다는 장점이 있다.
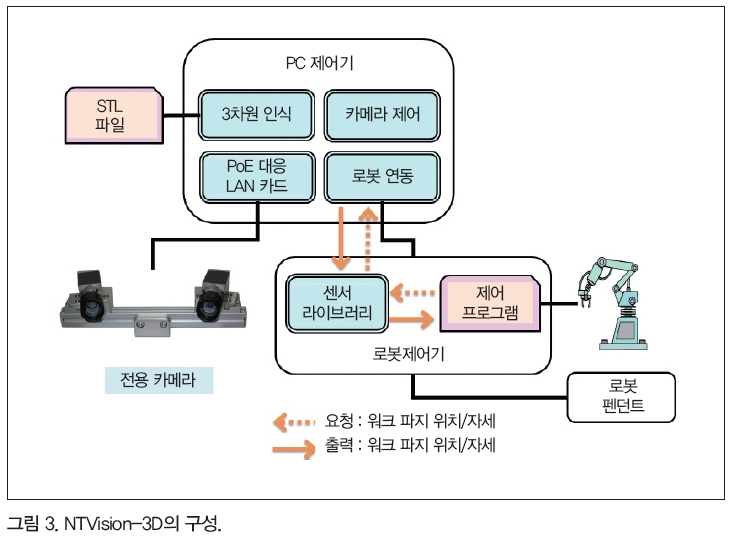 3차원 CAD 소프트웨어는 대부분 STL 형식 파일을 지원한다. 대상물의 STL 파일을 입력한 후 사용하는 로봇의 제어 프로그램과 연동해주기만 하면 나머지는 NTVsion-3D가 알아서 처리한다. 카메라 제어, 영상처리, 로봇 연동을 위해서는 별도의 PC가 필요하며, PC와 로봇 제어기는 통신으로 연결돼 있다. 그림 4는 NTVision-3D를 이용해 3차원 영상처리한 결과를 보여준다. NTVision-3D는 사용자가 입력해 준 대상물의 CAD 정보와 2대의 카메라를 이용한 3차원 측정 결과를 결합해 박스 내에서 특정 대상물을 선별하고 위치/자세를 로봇 제어기로 보내준다. 이때 단순히 대상물의 위치와 자세만 로봇 제어기로 보내주는 것이 아니라, 로봇에 달린 그리퍼가 대상물을 잡는 최적의 위치/자세를 지능적으로 판단해준다. 대상물이 섞여있을 때 제일 위에 있는 물체부터 하나씩 그리퍼로 집어야 하는데 이러한 최상위 물체의 인식, 그리퍼로 집을 수 있는 최적의 위치 등을 자동으로 판단해주는 것이다.
3차원 CAD 소프트웨어는 대부분 STL 형식 파일을 지원한다. 대상물의 STL 파일을 입력한 후 사용하는 로봇의 제어 프로그램과 연동해주기만 하면 나머지는 NTVsion-3D가 알아서 처리한다. 카메라 제어, 영상처리, 로봇 연동을 위해서는 별도의 PC가 필요하며, PC와 로봇 제어기는 통신으로 연결돼 있다. 그림 4는 NTVision-3D를 이용해 3차원 영상처리한 결과를 보여준다. NTVision-3D는 사용자가 입력해 준 대상물의 CAD 정보와 2대의 카메라를 이용한 3차원 측정 결과를 결합해 박스 내에서 특정 대상물을 선별하고 위치/자세를 로봇 제어기로 보내준다. 이때 단순히 대상물의 위치와 자세만 로봇 제어기로 보내주는 것이 아니라, 로봇에 달린 그리퍼가 대상물을 잡는 최적의 위치/자세를 지능적으로 판단해준다. 대상물이 섞여있을 때 제일 위에 있는 물체부터 하나씩 그리퍼로 집어야 하는데 이러한 최상위 물체의 인식, 그리퍼로 집을 수 있는 최적의 위치 등을 자동으로 판단해주는 것이다.
레이저 계측을 이용한 로봇비전
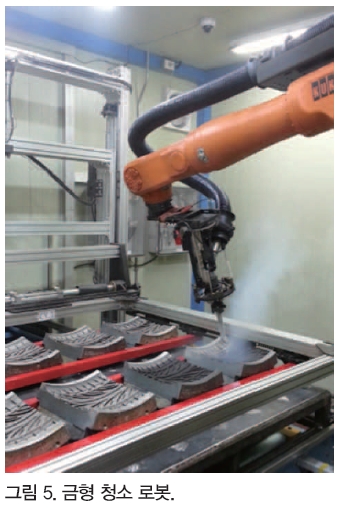
 대상물이 늘 영상처리 관점에서 쉬운 것만 있는 것은 아니다. 예를 들면, 대상물의 표면이 검은 분말로 뒤덮여 통상적인 2차원 카메라로는 윤곽 구분조차 되지 않는 청소 전의 금형이 있다고 하자. 효과적인 금형 청소를 하려면 작업자가 직접 표면의 요철을 따라 액체나 기체를 분사해야 한다. 이 공정에 로봇을 투입할 경우 3차원 비전 사용을 고려해보자. 그러나 대상물의 표면이 오염돼 검정 일색이라면 통상적인 2차원 또는 3차원 비전으로는 곤란하다. NT리서치에서는 금형의 2차원 영상 정보를 읽어내는 동시에 레이저 변위 센서를 이용해 금형의 깊이 정보를 측정하는 방식을 개발했다. 금형의 어느 부분을 레이저 변위 센서로 측정할지는 카메라에서 획득한 2차원 영상 정보로 판단할 수 있다. 이렇게 하면 금형의 요철에 근접해 액체 또는 기체를 분사하면서 효율적인 청소를 할 수 있다. 여러 개의 노즐을 고정해 액체/기체를 분사하거나 샌딩 등의 방법으로 표면을 청소하거나 하는 방법과 대비되는 지능적인 로봇 청소 방식이다. 이 방법을 이용하면 대상물의 종류와 형상이 수시로 바뀌어도 디버링(버 제거 작업), 도장이나 도포, 폴리싱 등을 지능적으로 수행할 수 있다.
대상물이 늘 영상처리 관점에서 쉬운 것만 있는 것은 아니다. 예를 들면, 대상물의 표면이 검은 분말로 뒤덮여 통상적인 2차원 카메라로는 윤곽 구분조차 되지 않는 청소 전의 금형이 있다고 하자. 효과적인 금형 청소를 하려면 작업자가 직접 표면의 요철을 따라 액체나 기체를 분사해야 한다. 이 공정에 로봇을 투입할 경우 3차원 비전 사용을 고려해보자. 그러나 대상물의 표면이 오염돼 검정 일색이라면 통상적인 2차원 또는 3차원 비전으로는 곤란하다. NT리서치에서는 금형의 2차원 영상 정보를 읽어내는 동시에 레이저 변위 센서를 이용해 금형의 깊이 정보를 측정하는 방식을 개발했다. 금형의 어느 부분을 레이저 변위 센서로 측정할지는 카메라에서 획득한 2차원 영상 정보로 판단할 수 있다. 이렇게 하면 금형의 요철에 근접해 액체 또는 기체를 분사하면서 효율적인 청소를 할 수 있다. 여러 개의 노즐을 고정해 액체/기체를 분사하거나 샌딩 등의 방법으로 표면을 청소하거나 하는 방법과 대비되는 지능적인 로봇 청소 방식이다. 이 방법을 이용하면 대상물의 종류와 형상이 수시로 바뀌어도 디버링(버 제거 작업), 도장이나 도포, 폴리싱 등을 지능적으로 수행할 수 있다.
힘 센서 DynPick을 이용한 로봇 응용
 인간은 오감을 통합적으로 이용해 지능적인 작업을 구현하기 때문에 로봇에 비전을 다는 것만으로 인간을 흉내낸 지능 구현은 곤란하다. 인간이 작업할 때 시각 정보와 더불어 가장 많이 쓰는 감각은 힘 정보다. 인간이 지닌 촉각과 같은 힘 정보를 로봇에 인공적으로 구현하는 것은 기술적으로 어렵다. 그래서 어떤 작용점에 인가되는 힘과 모멘트(회전력) 정보만을 검출하는 센서가 필요하다. 그것이 바로 힘 센서(Force Sensor)다. 6축 힘 센서는 특정한 작용점에 인가되는 3개의 힘(Fx, Fy, Fz)과 3개의 회전력(Mx, My, Mz)을 고속으로 출력할 수 있다.
인간은 오감을 통합적으로 이용해 지능적인 작업을 구현하기 때문에 로봇에 비전을 다는 것만으로 인간을 흉내낸 지능 구현은 곤란하다. 인간이 작업할 때 시각 정보와 더불어 가장 많이 쓰는 감각은 힘 정보다. 인간이 지닌 촉각과 같은 힘 정보를 로봇에 인공적으로 구현하는 것은 기술적으로 어렵다. 그래서 어떤 작용점에 인가되는 힘과 모멘트(회전력) 정보만을 검출하는 센서가 필요하다. 그것이 바로 힘 센서(Force Sensor)다. 6축 힘 센서는 특정한 작용점에 인가되는 3개의 힘(Fx, Fy, Fz)과 3개의 회전력(Mx, My, Mz)을 고속으로 출력할 수 있다.
힘 센서의 상용화 역사는 오래됐으나, 최근에 상용화된 DynPick은 힘 측정 방식이 참신하고 상대적으로 염가라는 점에서 혁신적이다. DynPick은 종래의 힘 센서와는 달리 센서 내부에 마이크로 프로세서가 있어서 RS232, USB, 이더넷과 같이 디지털 방식으로 출력할 뿐 아니라, 정전용량 방식을 채용해 제조원가를 대폭 낮췄다. 기존의 아날로그 힘 센서에 비해 1/3 정도의 가격이다.
 힘 센서를 그림 6과 같이 로봇 끝에 부착하게 되면 위치제어 로봇에서 힘 제어가 가능한 로봇으로 사용할 수 있다. 그러나 가장 간단한 힘 제어 로봇의 응용은 로봇 끝에 힘 센서를 부착한 후 다시 핸들이나 작업 툴을 연결하는 형태다. 작업자가 핸들로 로봇을 밀고 당기면 이때의 힘(교시력)을 센싱해 로봇이 인간과 함께 움직이는데 이를 직접교시(Direct Teaching)라고 한다. 직접교시를 이용하면 로봇의 이동 경로를 티칭 펜던트 대신에 직관적으로 알려줄 수 있다. 그리고 로봇이 알려준 경로를 저장해 반복적으로 재생할 수 있다. 한편, 직접교시를 이용하면 중량물을 이동하거나 조립할 때 작업자는 약한 힘을 힘 센서에 전달해 이동/조립 경로만 제시하고 중량물의 하중은 로봇이 받치는 형태로 로봇을 사용할 수 있다. 이러한 인간-로봇 협업 기능을 이용해 중량물을 옮기거나 조립하는 응용 사례가 늘고 있다. 한편, 아직 시험 단계이지만, 인간이 외골격 형태의 로봇을 입고 근력을 증강해 중량물을 옮기는 응용 사례도 늘어나고 있다.
힘 센서를 그림 6과 같이 로봇 끝에 부착하게 되면 위치제어 로봇에서 힘 제어가 가능한 로봇으로 사용할 수 있다. 그러나 가장 간단한 힘 제어 로봇의 응용은 로봇 끝에 힘 센서를 부착한 후 다시 핸들이나 작업 툴을 연결하는 형태다. 작업자가 핸들로 로봇을 밀고 당기면 이때의 힘(교시력)을 센싱해 로봇이 인간과 함께 움직이는데 이를 직접교시(Direct Teaching)라고 한다. 직접교시를 이용하면 로봇의 이동 경로를 티칭 펜던트 대신에 직관적으로 알려줄 수 있다. 그리고 로봇이 알려준 경로를 저장해 반복적으로 재생할 수 있다. 한편, 직접교시를 이용하면 중량물을 이동하거나 조립할 때 작업자는 약한 힘을 힘 센서에 전달해 이동/조립 경로만 제시하고 중량물의 하중은 로봇이 받치는 형태로 로봇을 사용할 수 있다. 이러한 인간-로봇 협업 기능을 이용해 중량물을 옮기거나 조립하는 응용 사례가 늘고 있다. 한편, 아직 시험 단계이지만, 인간이 외골격 형태의 로봇을 입고 근력을 증강해 중량물을 옮기는 응용 사례도 늘어나고 있다.
본문에서 언급한 것 외에도 양팔 작업 로봇, 무인운반 로봇 등, 앞으로 21세기 공장을 변모시킬 로봇 지능화 기술이 적지 않다. 특히 양팔 작업 로봇의 경우에는 자동화 장치의 큰 도움이 없이도 작업물의 로딩/언로딩, 작업물의 회전과 고정 등을 양팔로 처리할 가능성이 높다. 현재 로봇은 자동화의 일개 요소에 불과하지만, 양팔 로봇 기술이 성숙되면 자동화의 핵심 요소로 변모할지도 모른다.
로봇의 지능화는 인간의 작업을 분석해 로봇화하는 과정에서 이뤄진다는 점을 강조하고 싶다. 따라서 로봇 지능화 기술은 탁상공론으로 구현될 수 없으며, 작업 현장에서 로봇화를 적극적으로 추진해 생산성 혁신을 달성하고자 할 때 발전할 수 있다. 로봇 지능화의 최대 수혜자는 지능화 로봇을 적극적으로 도입해 생산성을 향상시키려는 로봇 활용 기업이 될 것이라고 본다. 
FA Journal 편집국 (Tel. 02-719-6931 / fa@infothe.com)
<저작권자 : FA저널 (http://www.fajournal.com/) 무단전재-재배포금지>






