![[이슈읽기] ‘특수통’ 오광수 민정수석 임명...이재명의 ‘이이제이’ 검찰개혁?](/news/thumbnail/202506/65366_74872_028_v150.jpg)


![[이슈읽기] 이재명-트럼프 첫 통화…'실용외교'와 '군기잡기'의 대결?](/news/thumbnail/202506/65355_74857_3153_v150.jpg)
1961년 미국 Unimation사에서 개발한 세계 최초의 로봇 팔 Unimate를 GM의 다이캐스팅과 스폿 용접에 적용한 이래 로봇 팔은 진화를 거듭해왔다. 점진적으로 모터 및 제어기술 발달에 힘입어 로봇 팔의 정밀도와 속도, 운반 하중, 외부 인터페이스 등은 비약적으로 발전했으며, 오늘날에는 로봇 팔을 자동화의 한 요소로 인정받으면서 손쉽게 생산 현장에 도입할 수 있게 됐다. 그러나 대부분의 로봇 팔들은 아직도 작업자와 격리된 고립무원의 자동기계로 이용되고 있다. 로봇기술이 발달하고 응용분야가 넓어지면서 이제는 이 고립무원의 일꾼을 인간과 협업하는 파트너로 삼고자 하는 노력들이 활발해지고 있다. 이번 칼럼에서는 이와 관련해 인간과 로봇의 협업기술에 대해 알아보기로 하자.
인간과 로봇의 협업기술
최근 FANUC과 동경대는 작업자가 로봇과 협업하며 케이블 조립 작업을 하는 로봇 시스템을 개발해 향후 사내 투입을 계획하고 있다(그림 1). 이 로봇 시스템은 모든 방향으로 움직이는 이동(Mobile) 로봇 위에 6축 로봇 팔을 양팔로 구성했다. 조립에 필요한 수많은 부품들이 적재된 선반에서 필요한 부품을 선택해 작업자에게 공급해주는 이른바 ‘지능형 트레이’ 개념을 실현했다. 로봇은 미숙련 작업자에게 수시로 바뀌는 작업 순서와 위치를 LCD와 레이저 포인터로 가르쳐준다. 인간과 로봇 팔의 예기치 않은 충돌을 방지하기 위해 카메라와 레이저 레인지 파인더(LRF)를 이용해 상시 감시한다. 이러한 협업 로봇은 2배 이상의 케이블 작업 속도를 향상시킨 성과가 있었다.

[그림 1. FANUC과 동경대에서 개발한 인간-로봇 협업 시스템.]
또 다른 예로, 자동화로 처리하기 곤란했던 케이블 작업 및 커넥터나 볼트의 체결 작업을 양팔 로봇으로 대체하려는 시도도 있다. 최근 미쓰비시전기에서는 양팔 로봇 끝에 3차원 비전 센서와 힘 센서를 부착해 서보 앰프를 조립하는 시스템을 발표했다. 3차원 형상 인식을 위해 그림 2와 같은 3차원 비전 센서를 사용하는데, 근적외선을 발사하고 돌아오는 시간을 측정해 형상을 인식하는 방식이다. 우선 부품 통의 케이블 다발에서 작업할 케이블 1개를 3차원 비전 센서로 인식한 후 로봇 핸드로 집는다. 케이블을 집은 상태에서 또 다른 3차원 비전 센서로 집고 있는 케이블의 자세를 인식해 정렬 지그에 꽂는다. 그리고 커넥터나 볼트의 조립 작업에서는 로봇 팔에 부착된 6축 힘 센서로 접촉력을 계측해 이에 따라 로봇 팔의 위치를 변경한다.
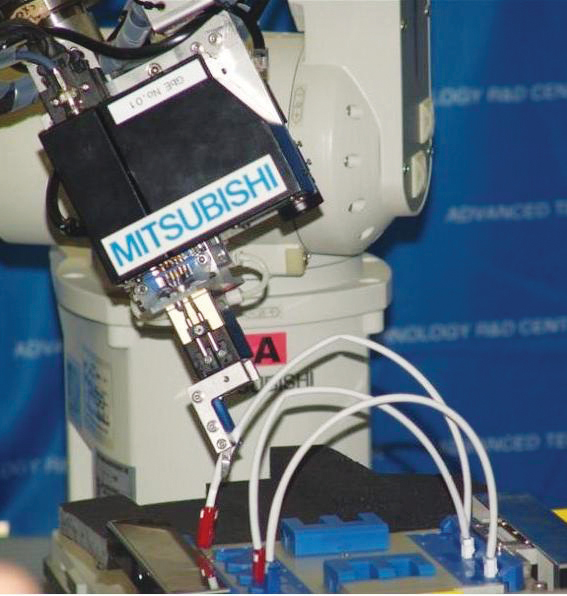
[그림 2. 양팔 로봇을 이용한 케이블 조립 작업.]

[그림 3. 3차원 비전 센서를 이용한 케이블의 영상처리 장면.]
로봇 2대를 양팔로 사용하기 때문에 로봇 간의 협조도 중요한데, 한 팔로 PCB를 건네주면 다른 팔로 커넥터나 볼트를 조립하는 식으로 작업의 분배가 이뤄지며, 필요하면 대상물에 맞는 핸드로 자동 교체한다. 인간과 같이 로봇도 조립 과정에서 실수를 할 수 있는데, 예를 들면, 케이블을 떨어뜨린다거나 커넥터를 체결하지 못하거나 그럴 수 있다. 이 때 로봇은 3차원 비전 센서와 힘 센서로 조립 실수를 신속하게 감지하고 재시도를 한다.
그리고 티칭 펜던트나 텍스트 기반의 로봇 프로그래밍(RPL)은 하나의 작업을 프로그램 하는데도 3일에서 7일이 소요되는 문제가 있었다. 이 문제는 그래픽 유저 인터페이스(GUI)에서 동작 순서와 제어 파라미터를 플로우 차트처럼 편집하는 그래픽 프로그래밍 방식으로 해결한다. 미쓰비시전기의 테스트 결과 서보 앰프 조립 시간은 작업자의 수작업 시간과 비슷한 5분 이내라고 한다.
협업의 장점과 안전 문제
현재의 제조업용 로봇은 안전 펜스를 이용해 작업자와 격리 상태에서 가동되고 있다. 그러나 미래의 제조업 현장에서는 인간과 로봇이 같은 공간 속에서 협업할 것이다. 협업의 장점은 로봇의 지능이 안고 있는 한계를 작업자와의 협업을 통해서 어느 정도 보완할 수 있다는 점, 작업자의 개입을 통해 로봇 작업을 유연하게 바꿔줄 수 있다는 점 등을 들 수 있다.
도요타자동차는 이러한 협업 로봇 기술을 생산 현장에 적용하기 위해 관련 기술을 개발 중이다. 2008년 발표한 차량 전후 유리 탑재 로봇은 2인 1조로 진행되던 작업을 1인이 50초 이내에 할 수 있게 해준다. 로봇의 작업 영역 속에 작업자가 있기 때문에 로봇의 오동작과 작업자의 부주의에서 발생하는 안전성의 확보가 무엇보다 중요하다. 이를 위해 로봇의 각 축을 구성하는 모터를 전부 80W 이내로 할 필요가 있다. 일본의 노동안전 규정에는 한 축이라도 80W의 모터를 쓰는 로봇은 제조업용 로봇으로 분류돼 작업자와 안전 펜스 등으로 격리할 것을 명시하고 있다. 따라서 인간과의 공존을 위해서는 모든 축이 80W 이내가 돼야 하는 것은 협업 로봇 도입의 최소조건이다. 이러한 모터 출력 조건을 만족하면서도 로봇은 작업에 필요한 운반 하중을 만족해야 한다. 2010년에 도요타가 발표한 보조 타이어 탑재 로봇의 경우, 운반 하중이 25kg에 이른다. 저출력 모터를 쓰고도 높은 운반하중이 실현 가능한 것은 로봇의 수직 하중을 보상하는 기구 설계 기술 덕택이다(도요타는 평행 링크 설계 채용).


[그림 4. 도요타 자동차의 인간-로봇 공존 시스템. (a)차량 유리 탑재 로봇, (b)보조 타이어 탑재 로봇.]
그 밖에도 인간과 로봇이 충돌할 경우를 대비해 센싱 방법과 충돌력을 최소화시키는 기술이 중요하다. 도요타의 유리 탑재 로봇의 경우는 로봇 끝에 6축 힘 센서를 부착해 충돌 여부를 고속으로 알아내고 충돌력이 최소가 되도록 모션 제어를 한다. 타이어 탑재 로봇의 경우는 6축 힘 센서를 사용하지 않고 모터에 흐르는 전류를 측정해 외력을 센싱하는 제어 방식을 채용했고, 힘 센서가 부착되지 않은 로봇 팔 본체에 작업자가 충돌하더라도 최대 충돌력을 70N 이내로 해 정지시킬 수 있다고 한다. 힘 센서 이외에도 레이저 센서나 카메라를 여러 대 이용해 2~3중으로 충돌 사태에 대비하고 있다. 그리고 협업 로봇에서는 인간의 동작 의도를 추정하는 것도 중요한데, 작업자가 로봇 팔에 가하는 교시력을 계측해 운반을 하려는 것인지 정밀 조립을 하려는 것인지 알아낼 수 있다. 인간의 안전만 확보된다면, 로봇은 인공력을 제공하고 작업자는 지능을 보태는 이런 작업이야말로 윈-윈이라고 할 수 있을 것이다.
협업 로봇의 미래적 가치
지금까지 인간과 협업하는 제조업용 로봇에 대해 간략히 알아보았다. 협업 로봇의 형태로서 제조업용 로봇의 틀을 벗어나 휴머노이드(인간형 로봇)나 인간과 로봇이 합체가 되는 웨어러블 로봇(입는 로봇)을 시도하는 연구그룹도 늘고 있다. 그러나 아직은 작업성이나 작업능력 면에서 제조업용 로봇에 못 미치는 것이 현실이다. 필자의 소견으로는 로봇의 형태보다는 작업성과 작업능력을 확보하는 것이 중요하다고 생각하므로 제조업용 로봇을 이용한 인간 협업 시나리오를 좀 더 평가하고 싶다. 고객들이 로봇에 요구하는 것도 전시효과가 아니라 생산성일 것이다.
로봇의 어원이 강제노역을 의미하는 체코어에서 유래됐다는 점과 함께 로봇에 대한 인간 최초의 상상은 자신의 노동력을 대체해주는 자동기계였다. 그러나 현재 실현 가능한 로봇 기술을 염두에 둔다면 일상생활에 휴머노이드 등을 전면적으로 도입하겠다는 움직임은 과도한 기대가 아닐까 한다. 그만큼 로봇이 살기에는 인간의 공공장소나 주거 공간이란 미지의 세계나 다름없다. 로봇이 주거공간에 들어오기 전에 인공적인 제조업 현장에 먼저 단련을 받는다면 훨씬 수월하게 능력을 발휘할 수 있을 것이다. 그래서 필자는 제조업 현장에서 묵묵히 일하는 제조업용 휴머노이드를 꿈꾼다. 공장에서 작업자와 같은 공간 속에서 협업하다 보면 언젠가는 공공장소나 가정으로 걸어 나오는 로봇도 등장하지 않을까?







