로봇의 중요한 기능 중 하나인 이동성(Mobility)은, 1968년 스탠포드 연구소에서 인공지능을 탑재한 최초의 이동 로봇인 Shakey를 발표한 이래 많은 연구자들이 모바일 로봇에 매료돼 연구개발을 해오고 있다. 모바일 로봇 연구에서는 출발점에서 도착점까지 경로를 지능적으로 생성하는 내비게이션 기능이 중요시돼 수많은 경로 생성 알고리즘이 개발됐다.
복잡한 환경 속에서 경로 생성을 위해서는 로봇이 환경을 지능적으로 인식해야 한다. 로봇 본체에 초음파 센서, 카메라, 레이저 스캐너 등을 달고 장애물의 유무, 거리, 이동 환경의 기하학적/영상적 특징을 인식한 후 경로 생성에 이용했다. 근년에는 실내 주행 및 장거리 야외주행에 성공하거나 여러 대의 로봇이 힘을 합쳐 감시나 협동작업을 수행하는 개발사례가 많아졌다. 이번 칼럼에서는 최근에 NT 리서치에서 개발해 병원에 적용하고 있는 무인이송 로봇인 Sbot를 예로 들어 모바일 로봇에 대해 자세히 알아보기로 하자.
의료용 무인이송 로봇 Sbot
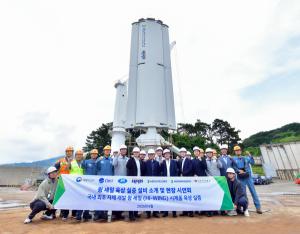
의료용 무인이송 로봇은 병원에서 혈액검체, 조직검체, 수술도구, 약품 등의 다양한 대상물을 로봇 뒷부분에 탑재한 채 출발점에서 도착점까지 운반한다. 이러한 대상물의 운반 작업은 병원의 진단검사과, 병리과, 수술센터, 약국 등에서 검사인력이나 간호인력이 직접하고 있는 일들이다. 병원 업무의 특성상, 신속성과 정확성이 요구되는 일이지만 모두들 기피하고 싶은 작업이기도 하다. 노동력 기피 작업에 로봇이 투입되는 전형적인 예라고 할 수 있는데, 이러한 운반 작업은 병원뿐 아니라 전자기계, 식품 등 제조업 현장에서도 빈번하게 발생한다.

[그림 1. 의료용 무인이송 로봇 Sbot.]
Sbot 로봇의 구조는 아랫부분부터 구동부 및 센싱부, 처리부, 표시부 및 수납부의 3등분으로 분류할 수 있다. 구동부는 2개의 바퀴와 모터로 구성돼 있는데 로봇의 무거운 하중을 지지하기 위해 4개의 보조바퀴를 사용하는 것이 특징이다. 그래서 로봇 본체의 중량 85kg에 80kg의 대상물을 무리 없이 운반할 수 있다. 지능적인 경로 생성을 위해 중간 부분의 센서부와 처리부에는 초음파 센서 6개, 레이저 스캐너 2개와 PC 제어기가 사용되고 있다. 초음파 센서가 장애물의 유무와 대략적인 윤곽을 알아내는데 비해, 레이저 스캐너는 넓은 시야각과 측정거리로 세세한 윤곽 정보를 측정한다. 초음파 센서가 유리문과 같은 투과성 장애물을 잘 인식하는데 비해 레이저 센서는 유리를 투과하는 단점이 있다. 이 두 센서 정보가 잘 결합돼 장애물의 유무, 장애물과 로봇 간의 거리, 환경의 윤곽 정보를 인식할 수 있다. 최근에는 이들 센서 외에도 2·3차원 카메라가 사용되는데 성능이 점점 향상돼 저가의 청소로봇에도 채용되고 있다. 그림 2는 경로 생성을 위해 부착된 센서들인데, 로봇의 표시부 상면에는 카메라 센서(그림 2(b))가 달려있어 미리 천정에 부착된 디지털 랜드마크(그림 2(a))를 인식해 로봇의 경로상 위치를 알아낸다. 여러 로봇이 동시 주행할 경우에는 각각의 로봇 위치도 확인해야 하는데, 무선장치(그림 3(c))와의 통신을 이용한다. 표시부는 로봇의 운반 진행 사항과 경유점이나 도착점을 입력하는데 사용된다. 표시부 뒷편의 수납부에는 운반 대상물이 놓이는데 용도에 따라 편리하게 수납 트레이를 교체할 수 있다.

(a) 천정 부착용 랜드마크 (b) 랜드마크 센서 StarGazer (c) 로봇 위치 센서 IGES
[그림 2. 경로 생성을 도와주는 센서.]
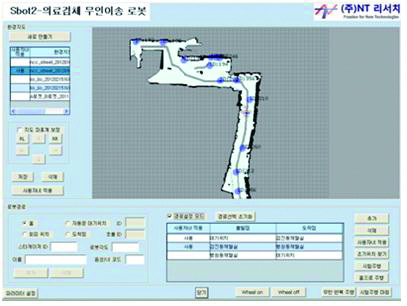
[그림 3. 모바일 로봇의 환경 지도.]
운반 작업 로봇화 과정
다음은 운반 작업을 로봇화하는 과정에 대해서 알아보자. 센서를 이용해 자율적으로 경로가 생성되는 로봇이라 하더라도 인간의 운반 작업 의도를 알 수는 없다. 사용자는 이러한 무지의 로봇에게 운반 경로를 알려줘야 한다. Sbot의 경우, 무선 조이스틱을 이용해 로봇에게 경로를 알려준다. 별도의 무선 조이스틱을 들고 로봇을 움직여가며 같이 산보를 한다고 생각하면 된다. 허나 로봇에게 경로를 알려준 다음부터는 로봇이 알아서 왕복을 해주면 좋겠지만 그리 간단한 문제가 아니다. 로봇이 긴 경로를 여러 번 왕복하다 보면 위치 오차가 누적돼 의도한 경로에서 조금씩 이탈하게 된다. 이를 방지하기 위해서 앞에서 소개한 카메라 센서를 이용한다. 이 카메라 센서는 천정에 부착된 디지털 랜드마크를 인식해 현재의 위치에 해당하는 번호를 확인한다. 이 위치번호로 로봇이 제대로 경로를 가고 있는지, 경로 교시값에서 어느 정도 벗어났는지 알 수 있어서 로봇의 위치를 보정할 수 있다. 별의 위치를 벗 삼아서 항로를 결정하는 뱃사람과 비슷하다.
그러나 로봇의 경로가 사전에 교시됐다고 하더라도 환경은 늘 변하기 마련이다. 병원의 경우, 로봇 앞을 바삐 지나가는 의료진과 환자, 여러 출입문, 이동 침대나 의료기기와 같은 장애물이 생겼다가 없어진다. 이런 환경 변화 때문에 로봇의 처리부에 저장된 환경 지도는 최신의 상태로 갱신돼야 한다. 그림 3은 로봇의 처리부에 저장돼 있는 환경 지도인데, 로봇이 환경을 어떻게 인식하고 있으며 경로를 계획하고 있는지 알 수 있다.
그림 4는 로봇의 사용법을 보여주는데, ▲로봇을 부르는 호출 버튼을 누른다 ▲로봇이 대기 위치에서 호출 장소까지 이동한다 ▲로봇이 호출 장소에서 도착하면 사용자가 대상물을 탑재한다 ▲로봇에게 도착점을 입력해준다 ▲로봇이 도착점까지 대상물을 이동한다 순이다.

(a) 호출
(b) 로봇 출동
(c) 대상물 공급
[그림 4. 운반 작업의 로봇화 절차.]
Sbot는 바닥에 로봇이 알아볼 수 있는 이동 경로를 표시해주거나 전파로 유도하는 방식이 아니라, 센서에 의한 환경 인식과 사용자의 교시를 결합해 이동한다. 따라서 경로의 변경이 간단하고 여러 경로를 저장해뒀다가 재사용할 수 있다.
좁은 통로에서 로봇과 사람이 동시에 지나갈 수 없으면 난감하다. 이때 로봇이 머리를 쓰더라도 그럴싸한 경로를 만들기가 어려울 수 있다. Sbot에는 협업 회피 기능이 있는데, 터치스크린의 옆에 부착된 3차원 마우스를 밀거나 끌어서 로봇을 사용자가 원하는 대로 움직일 수 있다. 이렇게 사람이 지나가면 이내 로봇은 마우스 조작 전의 원래 경로로 복귀해 자율주행을 재개한다. 협업 회피 기능은 사람의 보행을 우선하는 발상에서 비롯됐다. 그림 5는 로봇끼리 좁은 통로에서 만난 경우인데 어떤 로봇에게 통행 우선권을 줄지 결정해야 한다. 여러 대의 로봇을 운용하려면 우선권 제어가 필요한데, 이 부분은 별도의 모니터링 시스템이 관장한다.

[그림 5. 여러 로봇의 동시 주행.]
실제 시범서비스 현장 적용
국립 암센터에서는 2011년 하반기부터 NT 리서치 주관으로 시범서비스가 진행되고 있다. 이와 같이 의료 현장에서 9대의 로봇이 무인 운반 서비스를 하는 사례는 세계적으로도 드물다. 아직 혼잡한 엘리베이터를 탑승하는 서비스는 무리지만, 실내를 벗어나서 방과 방, 건물과 건물을 오가는 운반 서비스는 로봇기술이나 상용화 측면에서는 도전적이다.
앞으로 모바일 로봇기술은 우선 공장, 공공 서비스, 전문 서비스를 중심으로 상용화가 이뤄지다가 후에 가정에서도 안전한 이동 장치가 보급될 것이다. 인간이 보행과 이동을 통해 지능을 확장해 나갔듯이, 이동 로봇도 인간과 비슷한 진화의 역사를 걸을 것이다.