



 농촌에서 구전되는 농요의 흥겨운 가락 속에는 논갈이, 써레질, 추수, 타작 등 농사짓기의 고단함이 곳곳에 묻어난다. 예나 지금이나 농업이 힘든 것은 큰 변함이 없는데, 먹을거리에 대한 소비자의 불신, 농산물의 잦은 가격 변동, 농업 인구의 감소와 고령화에 따른 농촌 붕괴 등 우리 농촌과 농업의 현주소는 결코 밝지 않다.
농촌에서 구전되는 농요의 흥겨운 가락 속에는 논갈이, 써레질, 추수, 타작 등 농사짓기의 고단함이 곳곳에 묻어난다. 예나 지금이나 농업이 힘든 것은 큰 변함이 없는데, 먹을거리에 대한 소비자의 불신, 농산물의 잦은 가격 변동, 농업 인구의 감소와 고령화에 따른 농촌 붕괴 등 우리 농촌과 농업의 현주소는 결코 밝지 않다.
농업용 로봇은 농업을 공업화시키는 기술로서 오래 전부터 주목 받아 왔으나 실용화 사례는 매우 드물다. 지난 7월호 칼럼에서는 인공 농장에 대해 알아보았는데, 이번에는 현행 농법을 로봇화시키는 농업용 로봇에 대해 살펴보기로 하자.
농업용 모바일 로봇
농업용 로봇은 크게 경운기, 이앙기 등의 운전이나 작업을 무인화한 ‘농업용 모바일 로봇’과 과채류의 수확이나 접목 작업을 자동화하거나 무인화한 ‘농업용 로봇 팔’로 나눌 수 있다.
농업용 모바일 로봇은 경운기나 이앙기 등 농기계의 주행부와 작업부를 제어할 수 있도록 개조하고, 이와 함께 무인 주행이나 작업이 가능하도록 항법 센서나 제어기를 탑재한 형태다.
최근에는 GPS를 농업 차량에 사용하거나 자동차용 CAN(Control Area Network)을 탑재해 농업 차량의 조타, 변속, 승강 등의 운전 조작을 전기 신호와 액추에이터로 하는 연구가 진행되고 있다.
현재는 그림 1과 같이 일본제가 독식하던 모바일 농기계 시장을 국산화해나가는 단계이며, 아직 무인화는 연구 초기 단계에 머물러 있다. 무인화를 위해서는 무인 주행 기술이 핵심인데, GPS를 이용하는 방식 이외에 광학 측량 방식도 개발 중이다.

[그림 1. 국산 승용 이앙기(왼쪽)와 일본에서 개발된 무인 주행하는 이앙 로봇(오른쪽).]
이 방식은 경작지 주변에 광학 측량 장치를 기준국으로 설치하고, 농업 차량에 있는 광반사 표식을 자동 추적하면서 위치 계측을 해, 무선 통신으로 계측 위치를 차량에 송신한다. 그리고 차량 내의 지자기 방위 센서와 경사 센서 등으로 주행 방향이나 자세 정보를 취득해 조타, 엔진 스로틀, 클러치 등을 제어한다. 또한, 여러 대의 모바일 로봇이 일정한 상대각과 거리를 유지하면서 주행하는, 이른바 마스터-슬레이브 방식도 개발되고 있다.
이러한 농업용 모바일 로봇을 응용해 경운이나 이앙 작업 이외에 방제, 농약 살포, 제초 등을 시도한 사례가 발표되고 있는데, 기존의 농기계 기술을 바탕으로 하는 로봇기술인 만큼 현장 적용성은 가장 높다 할 수 있다.
농업용 로봇 팔
농업용 로봇 팔 기술에서는 여러 개의 관절로 이뤄진 로봇 매니퓰레이터를 사용한다. 이 시스템은 크게 대상물을 검출하는 카메라(로봇 비전), 작업이 이루어지는 팔, 팔 끝에 부착되는 핸드(또는 엔드 이펙터)로 구성된다. 여기에 이동 기구와 제어기, 동력원, 수확물의 수납부 등이 추가된다. 매니퓰레이터나 이동 기구는 시판품을 사용하고, 기타 요소들을 독자 개발하는 것이 일반적이다. 로봇 팔에서는 로봇 비전과 제어기의 성능이 시스템 전체의 성능을 좌우한다.
그림 2와 같이, 일본이나 미국 등에서는 토마토, 오렌지, 딸기 등의 수확 로봇의 연구개발이 이뤄지고 있다. 예를 들어 딸기 생산의 경우, 농작의 대규모화에 따라 수확 작업이나 포장 작업 등이 개발되고 있다. 딸기는 매우 유연하기 때문에 이것이 제대로 로봇화되면 다른 과채류의 로봇화도 가능할 것이라고 예상된다.

[그림 2. 일본에서 개발된 딸기 수확 로봇의 예. 수확물을 박스에 자동 수납.]
수확 로봇 중에는 작업자가 자고 있는 야간에 수확 가능한 과실만을 인식해 수확하고, 수확 못한 과실은 작업자가 다음날 수확하는 이른바 협동 작업 사례가 보고된 바 있다. 그러나 수확기 과실의 100% 수확은 어렵다, 수확 속도가 느리다, 로봇이 과실이 상하게 한다, 부정형 토지 위에서 안정적인 주행이 곤란하다 등의 다양한 문제점이 남아있어서 실용화의 장애가 되고 있다.
과채 수확 로봇
과채의 검출과 인식, 수확 적기를 판단하는 센싱의 고정도화가 매우 중요하다. 일반적인 과채 수확 로봇은 과실의 색과 형상, 크기 등의 특징량을 이용해 성숙도 판정이나 잎이나 가지 등 미수확 부분의 인식 등이 이뤄진다. 여러 대의 CCD 카메라에서 획득된 영상을 이용해 색을 판정하거나, 카메라 2대를 이용한 스테레오 영상법으로 3차원 위치계측을 한다.
그러나 수확 과실이 잎이나 가지에 가려져 있거나 과실이 서로 겹쳐져 있으면, 시각 인식 알고리즘이 번잡해지고 성능이 떨어져서 수확 작업의 효율을 보장할 수 없게 된다. 이를 해결하기 위해 로봇이 인식하기 어려운 과실은 지나치고 뒤따라오는 작업자가 수확하는 이른바 협동 작업으로 과실 개당 수확을 9~12초로 균일화한 개발 사례가 있다.
근본적으로는 재배 양식이나 작업 환경을 균일화하는 것인데, 예를 들어 로봇이 이동하고 작업하기 쉽도록 농토에 파이프와 같은 가이드나 리프트를 설치하는 방법, 수확 적기에 잎을 모두 제거한 후 수확하는 방법 등이 시도되고 있다. 과실의 재배 방법을 연구해 균일한 품질의 과실을 생산하려고 연구 중이며, 인공농장에서는 이것이 어느 정도 가능하다고 한다.
접목 로봇
간단한 로봇 팔을 이용한 국산화 사례로서 ‘접목 로봇’이 있다. 그림 3은 튼튼한 과채류 품종의 뿌리에 고품질의 열매가 열리도록 다른 품종의 줄기를 잘라 붙이는 접목 과정을 자동화한 접목 로봇이다. 예를 들어, 고추와 토마토를 합접하는 등 전문가에 의존하던 접목작업을 로봇화했다. 사람이 일일이 로봇에 작물을 투입하며 작업해야 하므로 완전 자동화는 아니지만, 비전문가라 하더라도 작업능률을 크게 올릴 수 있고 활착률(접목 성공률)도 90% 이상이라고 한다.
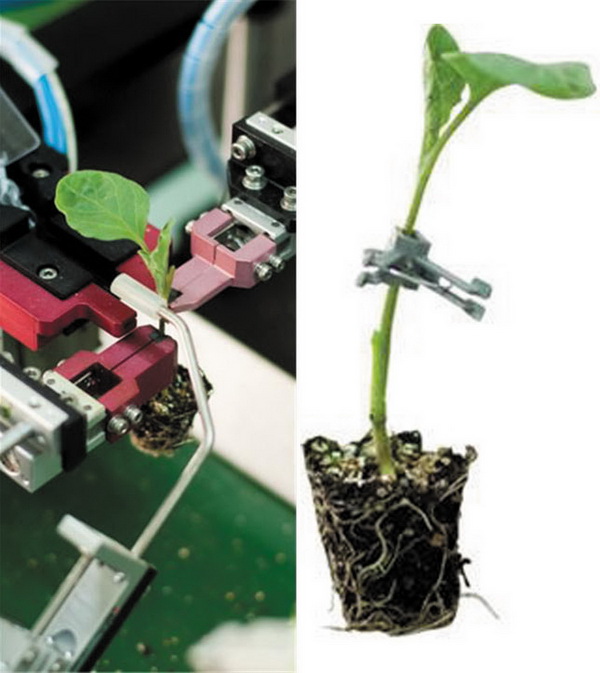
[그림 3. 국내에서 개발된 접목로봇(왼쪽)과 접목 후 모습(오른쪽).]
농업용 로봇의 특성상, 작물과 환경의 다양함 때문에 다목적 로봇을 만드는데 기술적인 제약이 많을 수밖에 없다. 따라서 한 농가가 다양한 농사짓기를 소화하기 위해서 수많은 농기계, 농업용 로봇을 구매해야 할지도 모른다는 불안감이 있다. 한 마을에서 공동구매를 하면 이러한 문제가 완화되겠지만, 자칫하면 농업용 로봇 회사들만 돈을 벌게 될지도 모른다. 기술적인 대안으로서 그림 4와 같은 농업용 근력 증강 로봇이 있다. 최근에 일본 토쿄농경대에서 개발한 근력 증강 로봇(파워 슈츠)은 어깨, 팔꿈치, 허리, 무릎에 8개의 초음파 모터를 사용하고, 무게는 18kg까지 경량화됐다. 작업에 따라 정형화된 패턴이 미리 저장돼 있어서 예를 들어, 무 수확의 경우 허리와 무릎 근력을 집중적으로 보조한다고 한다.

[그림 4. 동경농업대에서 개발한 농업용 근력증강 로봇.]
농업의 공업화
오랫동안 농업은 1차 산업, 공업은 2차 산업으로 분류돼 왔는데, 농기계를 시작으로 농업용 로봇의 도입은 이 두 산업의 경계를 조금씩 허물어뜨리고 있다. 인류의 역사에서 오늘날과 같이 농산물이 대량으로 유통되고 소비되는 시절은 없었으니, 목가적인 농업에서 공업화된 농업으로 사고를 전환해야 하는 것은 어쩌면 당연한 일이다. 해마다 줄어드는 농지 면적, 많은 젊은이들을 공업과 서비스업에 내주어야 하는 우리나라의 경우, 농업의 패러다임 전환과 농업용 로봇의 보급은 더는 선택이 아니고 필수일 수밖에 없을 것이다.






