


![[칼럼] 지속 가능한 성장 위한 필수조건, 인공지능의 눈으로 고객 신뢰도를 높여라](/news/thumbnail/202404/53094_59367_310_v150.jpg)
[인더스트리뉴스 조창현 기자] 국내 연구진이 소프트 로봇이나 웨어러블 장치 등에 적용할 때 초저전력으로 구동되면서도 무게 대비 34배에 달하는 큰 힘을 낼 수 있는 이온성 고분자 인공근육을 이용한 유체 스위치를 개발했다.

KAIST(총장 이광형)는 기계공학과 오일권 교수연구팀이 초저전력에 작동하며 협소한 공간에서 사용할 수 있는 소프트 유체 스위치를 개발했다고 지난 4일 밝혔다. 유체 스위치는 유체 흐름을 제어함으로써 특정 방향으로 유체가 흐르게 해 다양한 움직임을 유발하도록 한다.
오일권 교수는 “초저전력으로 작동하는 전기화학적 연성 유체 스위치는 유체 제어를 기반으로 하는 소프트 로봇과 소프트 일렉트로닉스, 미세유체공학 분야에서 많은 가능성을 열어줄 수 있다”며, “스마트 섬유에서 생체 의료기기에 이르기까지 우리 일상에서 초소형 전자 시스템에 쉽게 적용함으로써 다양한 산업현장에서 즉시 활용할 수 있는 잠재력을 지니고 있다”고 말했다.
인공근육, 기존 모터 대비 유연한 움직임 지원
기존 모터를 기반으로 한 스위치는 딱딱하고 부피가 커 제한된 공간 내에서 사용하기 까다로울 수 있다. 인공근육은 인간 근육을 모방한 조직으로 전통적인 모터 대비 유연하고 자연스러운 움직임을 제공한다.
KIAST는 인공근육이 소프트 로봇이나 의료기기, 웨어러블 장치 등에 사용되는 기본 소자 중 하나이며, △전기 △공기 압력 △온도 변화 같은 외부 자극에 반응해 움직임을 만들어 낸다고 설명했다.
오일권 교수연구팀은 좁은 관 속에서도 큰 힘을 내며 유체 흐름을 제어할 수 있는 이온성 고분자 인공근육을 개발해 소프트 유체 스위치로써 활용했다.
로봇·전자 산업 등에 적용 가능
연구팀이 개발한 이온성 고분자 인공근육은 금속 전극과 이온성 고분자로 구성돼 있다. 또 전기에 반응해 힘과 움직임을 발생시키는 원리로 작동된다.
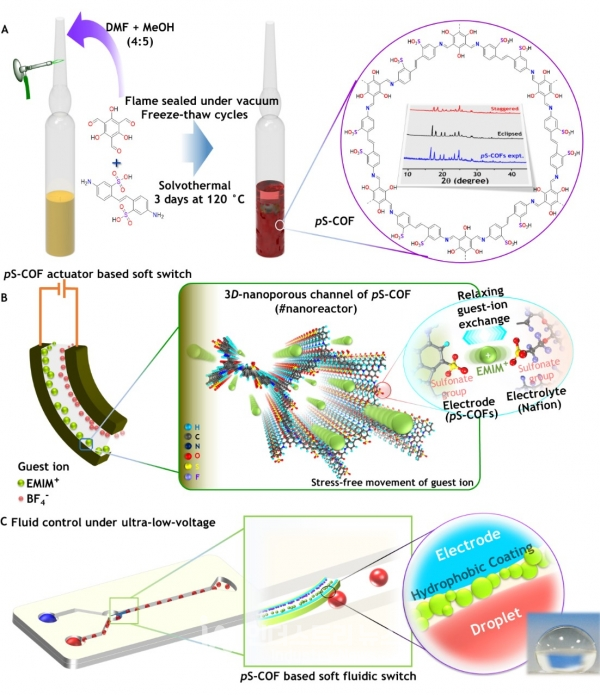
특히 연구팀은 인공근육이 0.01V 이하 초저전력에서도 구동되면서 무게 대비 큰 힘을 낼 수 있도록 유기 분자 결합을 통해 만든 다공성 공유결합성 유기 골격구조체(pS-COF)를 근육 전극 표면에 활용했다. pS-COF는 다공성 구조 내에 많은 이온을 함양할 수 있고, 설포네이트(sulfonate) 표면 작용기를 통해 원활한 이온교환을 유발할 수 있다.
연구 결과 머리카락 정도로 얇은 180 m 두께로 제작된 인공근육은 10mg이라는 가벼운 무게 대비 34배 이상에 달하는 큰 힘을 내며 부드럽게 움직였고, 연구팀은 낮은 전력으로 유체 흐름 방향을 정교하게 제어하는데 성공하게 됐다.
KAIST는 새로운 소자가 로봇이나 전자, 바이오 등 다양한 산업현장에 응용이 가능할 것으로 기대된다고 전했다. 구체적으로 새로운 소자는 유체 흐름제어를 통해 부드럽게 작동하는 소프트 로봇이나 마이크로유체채널을 갖는 전자 칩 등에 적용할 수 있다.
한편 새로운 소자 개발과 관련된 연구에는 KAIST 만마싸 마하토 기계공학과연구교수가 제1 저자로 참여했다. 연구 결과는 지난해 12월 국제 학술지 ‘사이언스 어드밴스드(Science Advances)’에 게재됐다.






