 산업용 로봇이 활약하는 장소가 확대됨에 따라, 예전에는 실현이 어려웠던 로봇에 의한 셀 생산 형태에 대한 요구가 전 세계적으로 생겨나고 있다.
산업용 로봇이 활약하는 장소가 확대됨에 따라, 예전에는 실현이 어려웠던 로봇에 의한 셀 생산 형태에 대한 요구가 전 세계적으로 생겨나고 있다.
일본 미쓰비스전기는 2011년도부터 산업용 로봇 ‘MELFA-F 시리즈’에서 지능화 솔루션으로 3차원 비전 센서, 역각 센서 등의 각종 기능을 선보이고 있다. 여기에서는 개별 적재 부품 공급 공정을 혁신하는 3차원 비전 센서 ‘MELFA-3D Vision’에 대해 소개하고, 그 특징과 인식처리 개요, 시스템 구성 등에 대해서 설명한다.
오쿠다 하루히사(Okuda Haruhisa)
미쓰비시전기 나고야제작소 로봇 제조부 지능화 개발추진 담당 과장
산업용 로봇은 지금까지 다양한 상황에서 활용돼 왔는데, 최근 그 활약의 장이 더욱 확대되고 있다. 그중 지금까지 사람이 하던 셀 생산을 대신해 기존에는 실현이 어려웠던 로봇에 의한 셀 생산 형태에 대한 요구가 전 세계적으로 생겨나고 있다. 그러나 이를 위해서는 기존 로봇에는 없는 새로운 기술을 도입할 필요가 있다.
개별 적재 부품 공급에 있어 기술 혁신
 개별로 적재된 부품의 공급은 이전부터 가장 어려운 로봇 작업 중 하나로 여겨져 왔다. 이것은 3차원 센싱 기술의 어려움과 더불어, 개별 적재된 상태에서 1개의 부품을 꺼내 원하는 공급 형태로 정렬한다고 하는 ‘핸드링 기술’의 어려움을 해결할 필요가 있었기 때문이다.
개별로 적재된 부품의 공급은 이전부터 가장 어려운 로봇 작업 중 하나로 여겨져 왔다. 이것은 3차원 센싱 기술의 어려움과 더불어, 개별 적재된 상태에서 1개의 부품을 꺼내 원하는 공급 형태로 정렬한다고 하는 ‘핸드링 기술’의 어려움을 해결할 필요가 있었기 때문이다.
사람은 이러한 작업을 아무렇지 않게 하고 있지만, 이를 위해서는 입체시각에 의한 센싱 기술뿐만 아니라, 손끝의 촉각과 손가락의 복합 동작에 의한 바꿔 쥐기 등의 핸들링 기술을 구사하고 있는 것이다.
미쓰비시전기는 이를 해결하기 위해 상세한 거리 정보 취득과 다른 물체로부터 분리한 후 1개를 꺼내는 것에 특화한 센싱 어프로치, 그 후의 정렬과정을 분리해서 취급하는 것이 현재 로봇 시스템에서는 효과적이라고 설명했다.
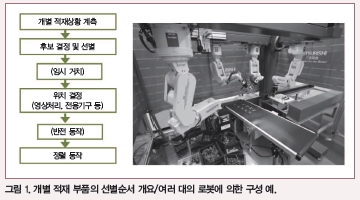
그림 1은 개별 적재 부품의 선별 순서 개요와 여러 대의 로봇에 의한 구성 예를 나타낸 것이다. 이것은 로봇의 손끝에 3차원 비전 센서가 장착돼 있는 ‘핸드 아이 구성’으로 돼 있어, 로봇의 가동 범위 내에서는 복수의 부품을 폭넓게 취급할 수 있는 것이 특징이다.
삼차원 비전 센서 ‘MELFA 3D-Vision’ 소형 카메라 헤드
 미쓰비시전기는 개별 적재 부품 공급 시스템을 구축하기 위한 핵심 부품으로, 산업용 로봇 ‘MELFA F 시리즈’의 옵션인 ‘MELFA-3D Vision’을 2013년 2월에 발매했다. 그림 2는 ‘MELFA-3D Vision(카메라 헤드부)’을 나타낸 것이다. 왼쪽에 있는 프로젝터부에서 계측용 패턴이 조사되고 물체상에서 반사된 계측용 패턴을 오른쪽 카메라로 관측해 3차원 정보를 복원할 수 있다.
미쓰비시전기는 개별 적재 부품 공급 시스템을 구축하기 위한 핵심 부품으로, 산업용 로봇 ‘MELFA F 시리즈’의 옵션인 ‘MELFA-3D Vision’을 2013년 2월에 발매했다. 그림 2는 ‘MELFA-3D Vision(카메라 헤드부)’을 나타낸 것이다. 왼쪽에 있는 프로젝터부에서 계측용 패턴이 조사되고 물체상에서 반사된 계측용 패턴을 오른쪽 카메라로 관측해 3차원 정보를 복원할 수 있다.
 센서의 특징
센서의 특징
소형 경량
- 소형 카메라 헤드(약 0.9kg, 146 (W)×87(H)×137(D)mm, 단, W는 가변)
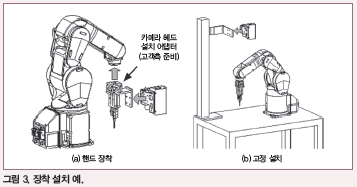
- 핸드 아이, 고정 설치에 대응(그림 3). 고정시 베이스라인 가변.
고속·고정밀 계측
- 계측 : 1.3초∼, 인식 : 1.2초∼ (무모델 인식)
※ 계측, 인식은 시스템 구성에 의해 병렬 처리 가능
- 최소 계측 오차 0.3mm∼
사람 손 정렬, 부품 피더 치환
 여러 인식 방법으로 개별 적재 부품의 선별 작업을 자동화
여러 인식 방법으로 개별 적재 부품의 선별 작업을 자동화
- 무모델 인식
대상 워크의 모델 등록이 불필요하고 3차원 위치만을 검출한다. 고속이면서 범용적으로 선별이 가능한 오리지널 방식으로, 여러 파지(把持) 방법(흡착, 평행, 핀셋 핸드)으로 대응이 가능하다.
- 3차원 모델 매칭 인식
워크에 3D-CAD 데이터(STL, OBJ 형식)를 사용해 워크의 3차원 위치 자세에 맞춘 선별이 가능하다.
로봇 제조사이기에 가능한 접속 친화성
- LAN 경유로 로봇 컨트롤러에 간단 접속, 전용 커맨드 준비
- PC가 필요 없으며 높은 신뢰성 확보
- 표준 서포트 소프트웨어(RT Tool Box2) 상에 센서 설정 전용화면 탑재
- 로봇과 센서의 교정(Calibration) 기능도 충실
3차원 위치 인식 방법
 그림 4는 각 인식 방법의 인식 결과 사례를 제시한 것이다. 무모델 인식에서는 워크의 모델정보가 불필요하며, 그리퍼나 흡착 패드의 사이즈로 잡을 수 있는 (흡착 가능한) 곳을 인식 위치로 하는 알고리즘으로 돼 있다.
그림 4는 각 인식 방법의 인식 결과 사례를 제시한 것이다. 무모델 인식에서는 워크의 모델정보가 불필요하며, 그리퍼나 흡착 패드의 사이즈로 잡을 수 있는 (흡착 가능한) 곳을 인식 위치로 하는 알고리즘으로 돼 있다.
그림 4(a)에서 그리퍼 끝 위치를 나타내는 2개의 흰색 원 사이에 있는 회색 원은 로봇에 대한 명령 위치를 나타낸다. 또, 그림 4(b)에서는 평행 핸드를 나타내는 평행선 사이의 원 부분이 명령 위치가 된다. 그림 4(c)에서는 원 부분이 흡착 패드 위치를 나타내고 흡착 핸드의 명령 위치가 된다. 이것들은 모두 여러 개의 후보 위치를 산출할 수 있어, 고속으로 선별이 가능하다.
한편, 모델 매칭 인식은 3D-CAD 데이터를 사용한 위치 자세 대조를 고속으로 실행하는 알고리즘으로 돼 있어 3차원 위치 자세 산출이 가능하다(그림 4(d)).
충실한 설정 환경
 그림 5는 설정 화면 구성을 나타낸 것이다. 미쓰비시전기의 로봇 표준 서포트 소프트웨어인 RT-ToolBox2상에 장착돼 있으며, ‘(2) 가이던스 메뉴’에 따라 순서대로 조작하면 간단하게 설정 및 조정이 가능하다. 물론 로봇과 센서 간의 교정 등 연계 동작도 간편하게 할 수 있다.
그림 5는 설정 화면 구성을 나타낸 것이다. 미쓰비시전기의 로봇 표준 서포트 소프트웨어인 RT-ToolBox2상에 장착돼 있으며, ‘(2) 가이던스 메뉴’에 따라 순서대로 조작하면 간단하게 설정 및 조정이 가능하다. 물론 로봇과 센서 간의 교정 등 연계 동작도 간편하게 할 수 있다.
시스템 구성
그림 6은 시스템 구성을 나타낸 것이다. 그림 중 ①∼⑤의 구성품이 제품 패키지로 동봉돼 있으며(실선으로 기재된 케이블 포함), F 시리즈 로봇과 조합해 사용할 수 있다.
적용 사례
 그림 7은 개별 적재 부품 선별 시스템의 구성 사례와 부품을 잡아 꺼내는 모습을 나타낸 것이다. 꺼낸 뒤에는 고정된 2차원 비전 센서에 의해, 자세 보정이 이뤄진 후 최종적으로 조립하는 곳이나 부품 저장소로 투입되는 등의 구성으로 돼 있다.
그림 7은 개별 적재 부품 선별 시스템의 구성 사례와 부품을 잡아 꺼내는 모습을 나타낸 것이다. 꺼낸 뒤에는 고정된 2차원 비전 센서에 의해, 자세 보정이 이뤄진 후 최종적으로 조립하는 곳이나 부품 저장소로 투입되는 등의 구성으로 돼 있다.
본 기사는 日本工業出版이 발행하는 월간 画像ラボ와 기사협약에 의해 轉載한 것입니다.
FA Journal 편집국 (Tel. 02-719-6931 / fa@infothe.com)
<저작권자 : FA저널 (http://www.fajournal.com/) 무단전재-재배포금지>