일부 고급 애플리케이션은 이동 중 목표 위치에 대한 수정 및 변경이 필요하다. 일반적으로 위치 변경은 비전 시스템을 통해 위치 오차를 감지해 구현한다.
일부 고급 애플리케이션은 이동 중 목표 위치에 대한 수정 및 변경이 필요하다. 일반적으로 위치 변경은 비전 시스템을 통해 위치 오차를 감지해 구현한다.
최고 속도로 이동하는 중에도 최종 타깃을 향해 빠르게 이동하면서 이미지를캡처하고 보정 값을 계산하며, 새로운 목표 위치로 이동할 수 있는 일련의 기능을 구현하는 것이다.
장비의 전체 처리량은 빠르고 원활하면서도 안정적인 위치 보정 동작 여부에따라 좌우된다. 이는 선별된 컴포넌트의 정렬을 비전 시스템으로 수행된 측정 결과에 따라 정정해야 하는픽&플레이스 또는 최종 목표점을 비전 측정 결과에 따라 수정해야 하는 본딩 애플리케이션의 경우에해당된다.
위치 업데이트와 보정을 수행하는 최적의솔루션
엘모의 ‘플라잉 비전(FlyingVision)’은 공정속도나 최상의 정확도 및 안정성을 감소시키지 않고도 모든 형태의 즉각적인 위치 업데이트를 수행할 수 있는 최적의독보적인 솔루션이다. 일부 애플리케이션에서 엘모의 플라잉 비전은 공정 속도를 30% 이상 향상시킬 수 있었다.
플라잉 비전은 PCB Drilling,Flying Probes, Cut to Length 등과 같은 고속 이동 중 빠르고 안정적으로 위치 보정을 수행해야 하는 장비에 최적의솔루션이다.
빠르고 정밀하게 수행되는 모션
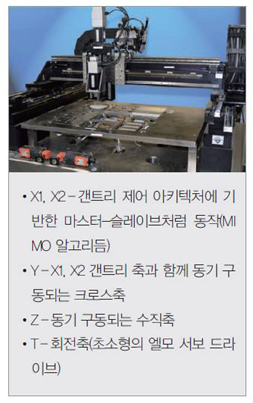
각각의 장비는 5개의 엘모 골드서보 드라이브로 구성된 두개의 갠트리부를 동시에 구동한다.
시스템 내의 총 10개의 드라이브는 EtherCAT 네트워크를 통해 한 개의 엘모 다축 컨트롤러(G-MAS)로구동된다. 특수한 고속 비전 시스템은 픽&플레이스의이동 경로상 반드시 통과하는 고정점과 카메라 위치를 통과해서 지나가야 하는 각 갠트리 경로 상에 위치하고 있다.이 모션은 가능한 빠르고 정밀하게 수행돼야 한다.
이 솔루션의 핵심 요소 중 하나는 카메라가 스냅 사진을 찍는 동안 멈추지않고 빠르고 부드럽게 각각의 다른 픽&플레이스 위치에서 카메라가 있는 곳을 통과해서 지나가야하는 것이다. 컴포넌트가 정확한 카메라 위치에 도착하면 2개의 OC(Output Compare) 기능으로 카메라에 정확한 촬영 시점을 전달해야 한다.
촬영된 이미지 정보는 상위의 호스트 컴퓨터나 카메라에서 직접 처리되며, 컴포넌트가 최종적으로 정렬되기 직전에 관련된 구동축으로 최종 회전 및 X,Y 오프셋 이동량을 전송한다. 호스트 컴퓨터는EtherNET 네트워크를 통해 이동하는 동안에도 최종 좌표를 G-MAS로 전송할 수 있으며, 데이터 처리 시간이 비교적 여유가 있기 때문에 스냅 사진을 찍는 순간부터 최종 정렬 위치 도착 전까지 수밀리초 안에 데이터를 전송할 수 있다.
머신 솔루션 위해 메커니즘 제안
분산형 갠트리 제어를 위한 엘모의 솔루션은 갠트리 서보 드라이브 사이에 적절한시리얼 통신 채널을 구현함으로써 과도한 필드버스 네트워크 부하를 제거할 수 있다. 한 축은 갠트리 마스터로설정돼 슬레이브에서 모든 필요한 정보를 가져오고, MIMO 알고리즘에 의해 시스템이 PWM 레벨 드라이브로 완전히 동기화가 되도록 유지한다.

이러한 형태의 구조에서는 갠트리 제어 알고리즘 처리를 위해 G-MAS가 필요 없기 때문에 X1, X2 갠트리 드라이브는 네트워크레벨 상의 하나의 X축 드라이브로 간주된다. 이러한 ‘단일축’은고속 동기 X, Y 2차원 머신 모션을 수행하기 위해 별도의 Y축과그룹화된다.
엘모는 이러한 머신 솔루션을 위해 가능한2가지의 메커니즘을 제안한다. 앞에서 언급한 것처럼 이 솔루션의 핵심 요소는 고도의 X, Y 동기 모션을 수행하면서도 위치확인 및 속도, 가속/감속 면에서 모두 원활한 모션 프로파일을 갖춰 빠른 속도 및 높은 정밀도로 카메라가 위치한 곳을 통과해 지나가는것이다.
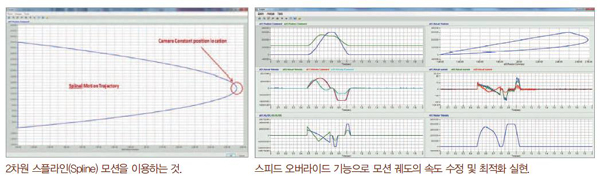
최초의 솔루션은 2차원 스플라인(Spline) 모션을 이용하는 것이었다. 엘모는 여러 작동 모드의스플라인 궤도를 이미 지원한다. 이 솔루션에 가장 적합한 방법 중 하나는 사용자가 제한된 벡터 속도및 가속도로 정의된 스플라인 위치 테이블을 사용할 수 있도록 해주는 것이다. 2차원 X, Y 스플라인 경로 생성 기능은 가능한 최고의 속도 및 최상의 정밀도로 정의된 위치를 통과할 수 있도록 해준다.
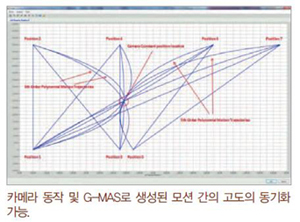
두 번째 솔루션은 특수한Polynomial 펑션 블록 메커니즘과 관련돼 있다. 이 첨단 G-MAS 기능은 특수 분할 모션 펑션 블록을 이용해 하나의 완벽한 동기식 모션 궤도를 구현할 수 있도록 해준다. 이 모드에서 사용자는 모션 궤도의 일부 혹은 전체로써 보조점 또는 최종 위치점을 설정할 수 있다.
G-MAS 프로파일러는 Polynomial Transition 경로를 이용해사전 정의된 중간점을 통과하게 된다. 이러한 첨단 기능을 통해 사용자는 위치, 속도, 가감속 설정 및 자동회전 제한 기능을 통해 부드러운 모션경로 생성이 이뤄지므로 복잡한 모션 궤도를 비교적 간단한 방법으로 구현할 수 있다.
G-MAS의 뛰어난 기능
스피드 오버라이드(SpeedOverride) 기능을 이용해 G-MAS는 움직이는 동안 최종 X, Y 회전 좌표를 카메라에서 수신할 때까지 대기시간 기능처럼 모션 궤도의 속도를 수정할 수 있다. 이 기능은 각 픽&플레이스 주기 이동에 최적화된 시간을 알수 있도록 속도를 최적화한다.
이외의 부가적인 강력한 G-MAS 기능은슈퍼임포즈드 모션을 사용할 수 있다는 점이다. G-MAS는 가상 축을 어떠한 독립 또는 그룹화된 시스템축과 ‘연결(Linking)’ 할 수 있도록 해준다. 실제또는 가상 축 궤도의 슈퍼임포즈드 위치는 실제 축 궤도의 최종 위치가 된다. 이러한 기능을 통해 이동하는동안 오프셋 위치를 즉각적으로 시스템의 어떠한 축에도 추가할 수 있으며, 전체 이동시간을 변경하지 않고도모션 펑션 블록으로 사전 정의된 원래의 이동 경로를 수행할 수 있다.
2개의 OC 기능은 모션 궤도 위치를기준으로 플래시 동작 및 카메라 트리거링을 위해 사용된다. 이 기능을 통해 카메라 동작 및 G-MAS로 생성된 모션 간의 고도의 동기화가 가능하다.
엘모모션컨트롤 제공
FA Journal 편집국 (fa@infothe.com)
<저작권자 : FA저널 (http://www.fajournal.com/) 무단전재-재배포금지>