![[이슈읽기] 선관위원장 “부실관리” 또 사과...‘특혜 받은 헌법기관’의 추락](/news/thumbnail/202505/65080_74410_736_v150.jpg)

![[D-3] 이재명 수도·충청권, 김문수 경북·강원권 표심 공략](/news/thumbnail/202505/65077_74404_2122_v150.jpg)

[글 유블럭스 한국지사 박성진 이사] 고정밀 위치추적 기술은 사용 편의성, 효율, 신뢰성 및 성능을 향상시켜 잔디깎이 로봇의 혁신을 이끌고 있다. 새로운 OpenMower 데모 플랫폼을 통해 고정밀 위치추적 기술의 가치를 직접 체험해 보자.

기존 잔디깎이 로봇은 매립된 경계선들로 구획되어진 영역 안에서 간단한 센서들을 사용해 나무나 그 밖의 다른 장애물에 부딪히지 않도록 임의로 주행하며 잔디를 깎게 되며 작업 결과는 대체로 만족스러운 편이다.
시간은 좀 걸리고, 축구 경기장처럼 완벽한 줄무늬 패턴을 그리고자 하는 바람은 접어야 한다. 하지만 적어도 사람이 직접 힘을 쓰지 않고 잔디를 깎을 수 있다는 것은 확실하다.
현재 고정밀 GNSS(global navigation satellite system) 기술 덕분에 상황이 한 단계 업그레이드됐다. 센티미터 수준의 위치추적 정확도를 제공하는 RTK(real-time kinematic) GNSS 수신기가 체계적이고 효율적으로 잔디깎이 로봇을 유도함으로써 같은 곳을 두 번 작업하지 않도록 한다.
구획 경계선은 더 이상 필요없다. 시간과 전기를 절약하고 소중히 가꾼 화단을 침범하지도 않는다. 포기해야 했던 잔디구장의 완벽한 줄무늬 패턴도 RTK GNSS 기술을 사용하면 선명하게 표현할 수 있다.
OpenMower, 평가를 쉽고 빠르게
이 말이 과장처럼 들린다면 유블럭스(u-blox)의 ZED-F9R RTK GNSS 수신기를 기반으로 개발된 오픈소스 잔디깎이 로봇 테스트 플랫폼 OpenMower를 이용해 이 기술이 얼마나 훌륭한지 직접 체험해 볼 수 있다.
OpenMower 프로젝트 설립자이자 소프트웨어 엔지니어링, 하드웨어 설계, 로봇에 대한 열혈 매니아인 클레멘스 엘플라인(Clemens Elflein)이 개발한 OpenMower는 ROS(robotics operating system)를 기반으로 구축됐으며, 서로 다른 센서 셋업을 사용해서 다양한 로봇 시스템을 프로토타이핑할 수 있는 고도로 유연한 플랫폼을 제공한다.
잔디깎이 로봇을 개발하는 개발자들은 다음과 같은 광범위한 질문들과 대면하고 있다. 자신의 특정 활용 사례에 대해 어떤 센서가 위치추적 솔루션을 가장 잘 보완할 수 있을까? 자신이 개발하는 센서 융합 알고리즘이 관성 센서와 바퀴 회전(wheel tick) 정보를 얼마나 잘 활용할까? 단층 주택, 아파트 같은 공동 주택, 나무, 울타리 같은 것들이 있는 장소에서 위치추적 결과가 얼마나 정확할까?
OpenMower는 제품 개발자들이 이러한 질문들에 대해 답변하고, 고정밀 위치추적 솔루션의 성능을 평가하고, 자신이 개발한 프로토타입을 시험해 볼 수 있는 강력한 툴을 제공한다.
하드웨어와 소프트웨어로 구성되는 OpenMower는 즉시 사용 가능한 잔디깎이 베이스에 모든 가혹한 기상 조건에서 테스트할 수 있도록 하는 전천후 하우징을 포함한다. 시스템 셋업이 완료되면 개발자는 곧바로 잔디깎이를 일정시간 동안 작동시켜 성능 데이터를 수집할 수 있다. 정확한 위치추적 솔루션을 사용할 수 없을 때는 KML과 비디오 레코딩을 사용해서 경로 이탈 오차를 확인할 수 있다.
실제 테스트 결과
우리는 실제 테스트를 위해서 독일의 한 주택 뒤뜰에서 유블럭스 ZED-F9R-03B를 적용한 Ardusimple의 RTK+INS SimpleRTK2B 보드를 사용해 OpenMower를 작동시켰다. 수집된 테스트 데이터를 보면 경계가 불규칙한 8m x 8m 부지를 3회의 패스에 걸쳐서 통과하며 마당 한가운데에 서 있는 나무는 피해야 한다는 것을 알 수 있다.
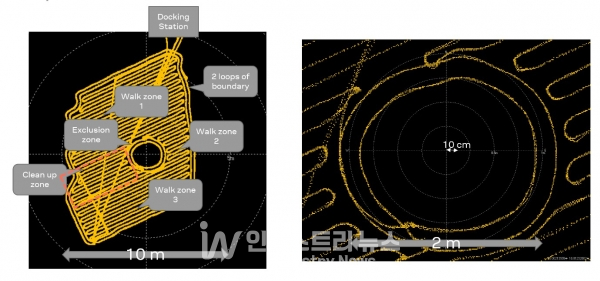
결과는 KML 레코딩으로 포착한 것으로 여기에 나타난 모습 그대로다. 길게 뻗은 직선들을 보면 각각의 패스가 어떻게 중첩되는지 알 수 있다. 한편 회전할 때 보여주는 불규칙성은 대개가 불완전한 모터 제어로 인한 것이다.
정확한 성능은 잔디깎이 로봇을 부드럽게 제어하기 위해 충분히 높은 업데이트 속도로 자세와 위치추적 정보를 제공하는 ZED-F9R 모듈에 의해 가능해진다.
다양한 동작 모드 지원
OpenMower는 다양한 동작 모드를 지원하도록 설계됐다. 이 시스템은 베이스/로버 셋업 여부, PointPerfect 같은 보정 서비스 사용 여부 및 관성 센서 측정과 휠 틱(wheel tick, WT) 입력의 사용 여부를 결정해 적용할 수 있다.
위치추적 솔루션은 유블럭스 ZED-F9P RTK GNSS 수신기나 유블럭스 ZED-F9R RTK GNSS 수신기를 사용할 수 있으며 셀룰러 기술에 초점을 맞춘 시스템 설계의 경우에는 유블럭스 XPLR-HPG-2 익스플로러 키트를 사용할 수도 있다.
사용하는 셋업에 따라서 GNSS 보정이 RTCM/NTRIP으로 제공되거나, 또는 와이파이나 4G LTE 무선 통신을 통해 PointPerfect/MQTT를 사용할 수도 있다.
![OpenMower 데모 및 테스트 플랫폼을 구성하는 핵심부품 표 [자료=유블럭스]<br>](/news/photo/202304/49435_53090_450.jpg)
핵심 구성
OpenMower 데모 및 테스트 플랫폼을 구성하는 핵심 부품들은 위 그림과 같다. 위치추적 솔루션은 유블럭스 ZED-F9P 또는 유블럭스 ZED-F9R을 채택한 Ardusimple RTK GNSS 수신기로 구성되며, 4G 모뎀을 사용해서 NTRIP나 MQTT를 통해 GNSS 보정 데이터를 수신한다.
![유블럭스 한국지사 박성진 기술담당 이사<br>[사진=유블럭스]](/news/photo/202304/49435_53077_235.jpg)
메인 애플리케이션 프로세서로서 기가바이트 대의 스토리지를 포함하는 라즈베리 파이 4(Raspberry Pi 4)와, 메인 센서와 충전을 제어하는 용도의 라즈베리 피코(Raspberry Pico)는 잔디깎이용 레퍼런스 디자인으로서는 확실히 성능이 과하다.
대신 OpenMower는 단지 잔디깎이만이 아니라 다른 많은 로보틱스 어플리케이션의 평가 작업용으로도 사용할 수 있도록 설계됐다.
여기에는 농장에서 토양 샘플을 채취하기 위한 소형 로봇, 축구 경기장에서 라인을 그리거나 잔디밭 위에 회사 로고를 그리기 위한 로봇, 땅 속에 매장돼 있는 유물을 탐사하기 위한 로봇 등이 포함될 수 있다.


![[D-4] 이재명](/news/thumbnail/202505/65073_74400_47_v150.jpg)
